I use load Cells as Force Sensors. Torque can be calculated by multiplying Force by the radius at which it is measured.
Load Cells come from Weigh Scales, they can be bought separately. Considering the size and weight of the robot, I have to use Load Cells with max 20 kg (~200 N) capacity. These cells come as aluminium prisms 12.7×12.7×55.25 mm fully equipped with wired strain gauges and M5 tapped holes. The four wires are connected as a Wheatstone Bridge to a dedicated amplifier circuit (Texas Instruments INA125U) on the Joint Control Board.
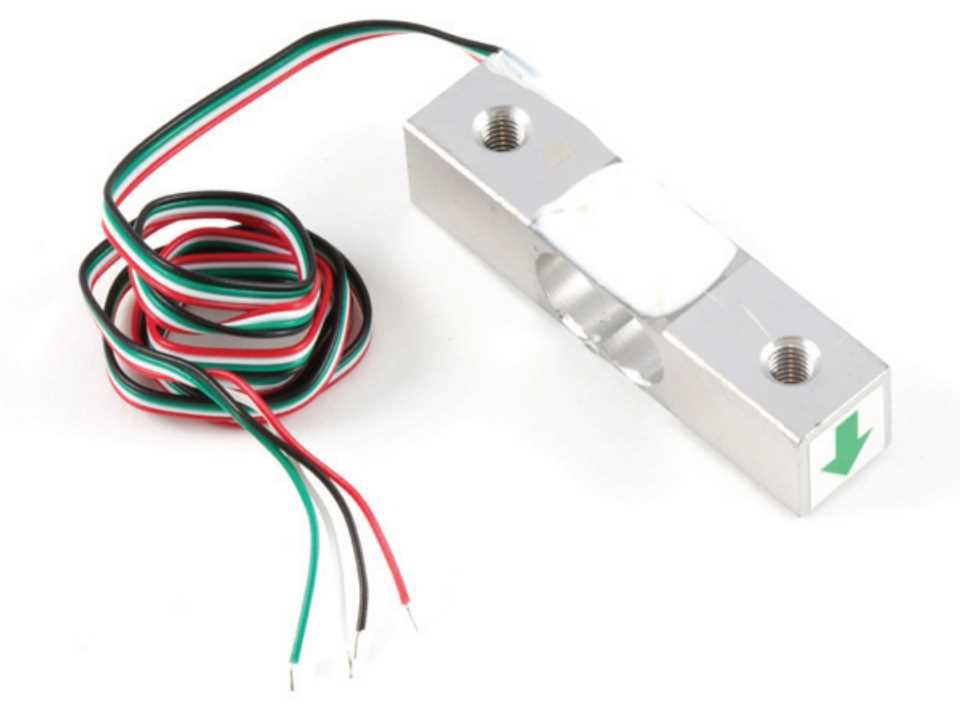
Force can be measured along the green arrow direction (see image below) in both positive and negative direction.
Torque is mesaured on the four following axis : y3 (hip), y4 (knee), y5 and x6 (ankle)

Please go to the Leg Design Sections to see in details how the sensors are fitted on the robot joints. The Joint Control System Section describes how the measured Ankle Forces are converted into Torques.
