Welcome to this Blog dedicated to my Robotics experiments !
Humanoïd robotics is a fascinating exploration field either for the influence it might have in our lives or for the engineering challenges it represents. Watching Atlas from Boston Dynamics walking, running and even executing a perfect salto would have looked impossible not so long ago. The accelerating pace of innovations gives an insight of what humanoïd robots might do, good or bad, in a very near future…
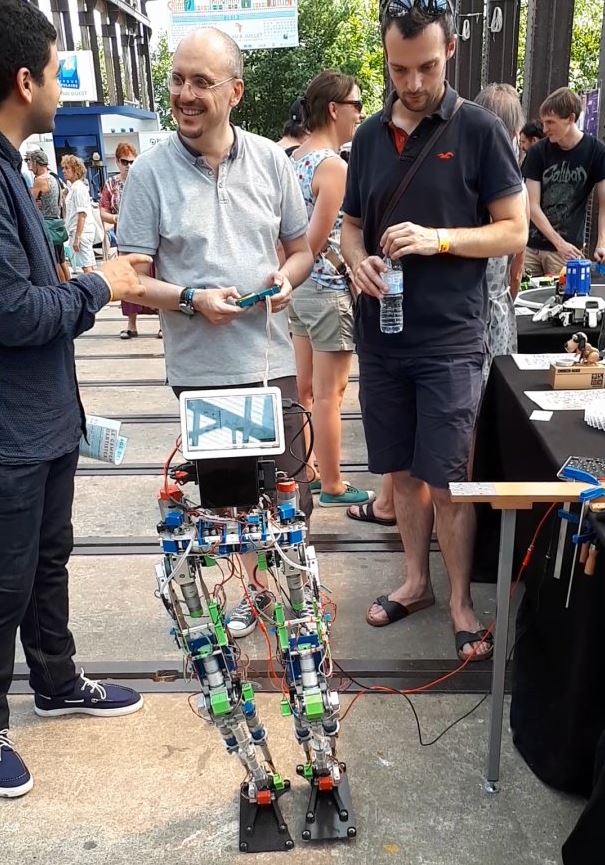
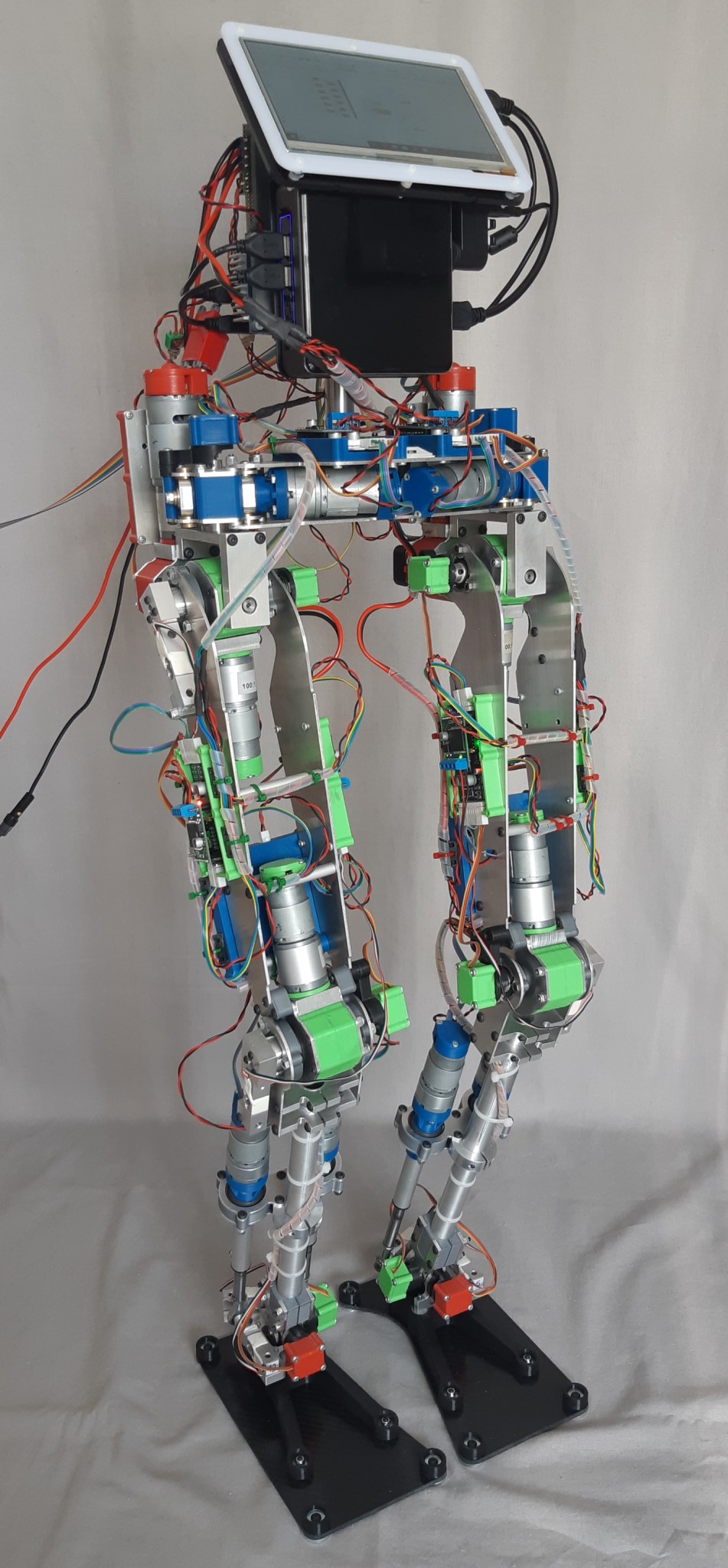
I chose to make my own experiments on bipedal walk. I wanted to put to the test my skills in engineering, manufacturing, electronics, IT and System Control on a very challenging topic.
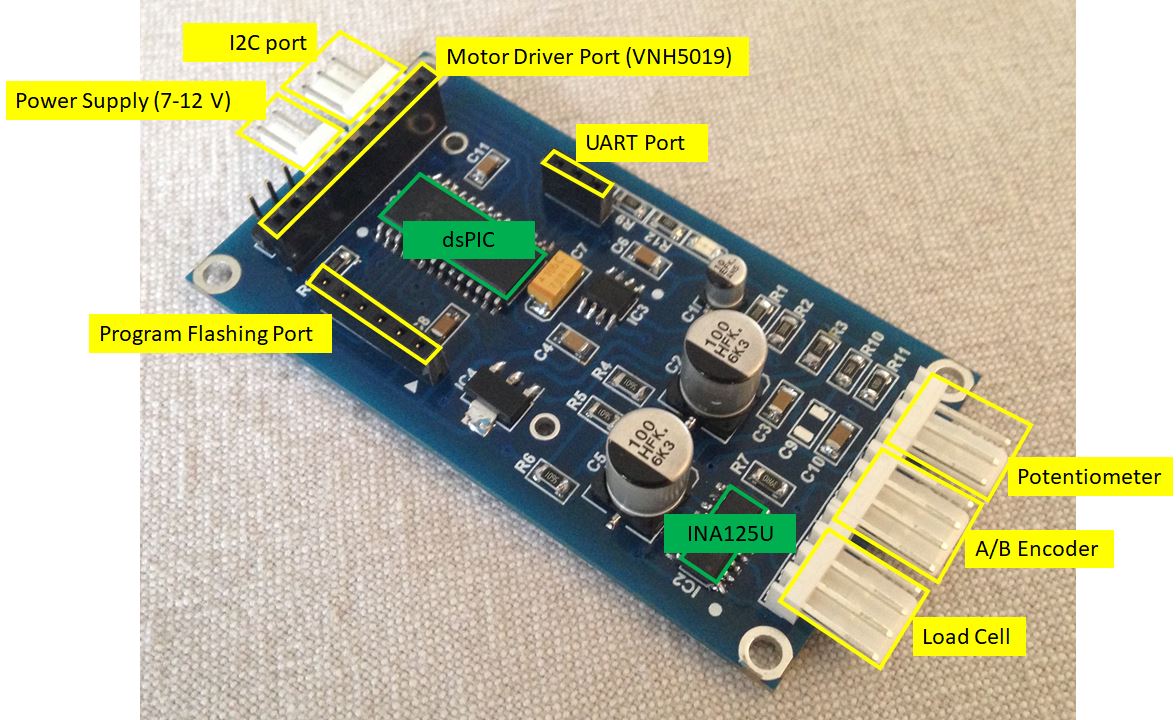
I manufacture all mechanical components, electronics boards and I write all the S/W used in my Robot.
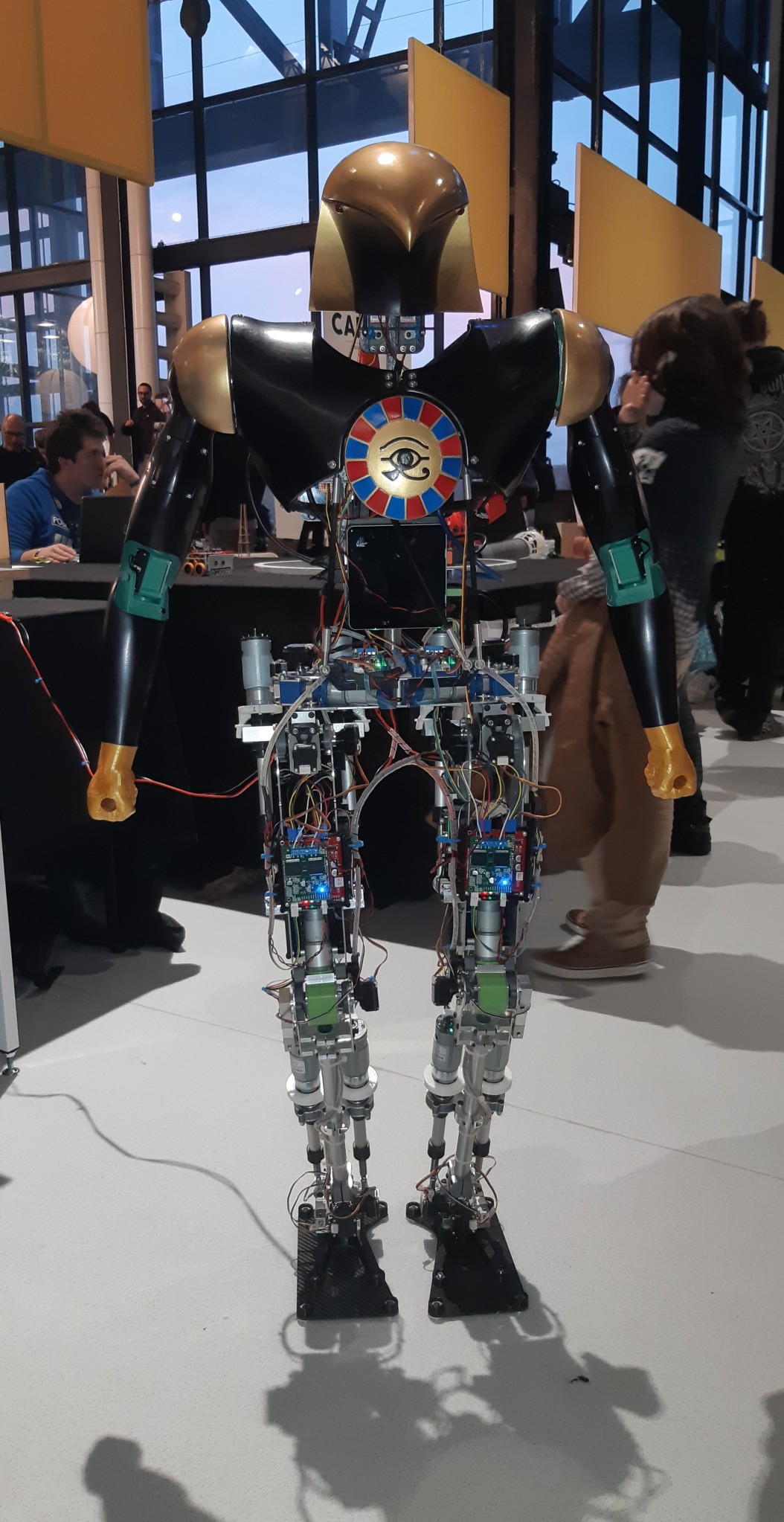
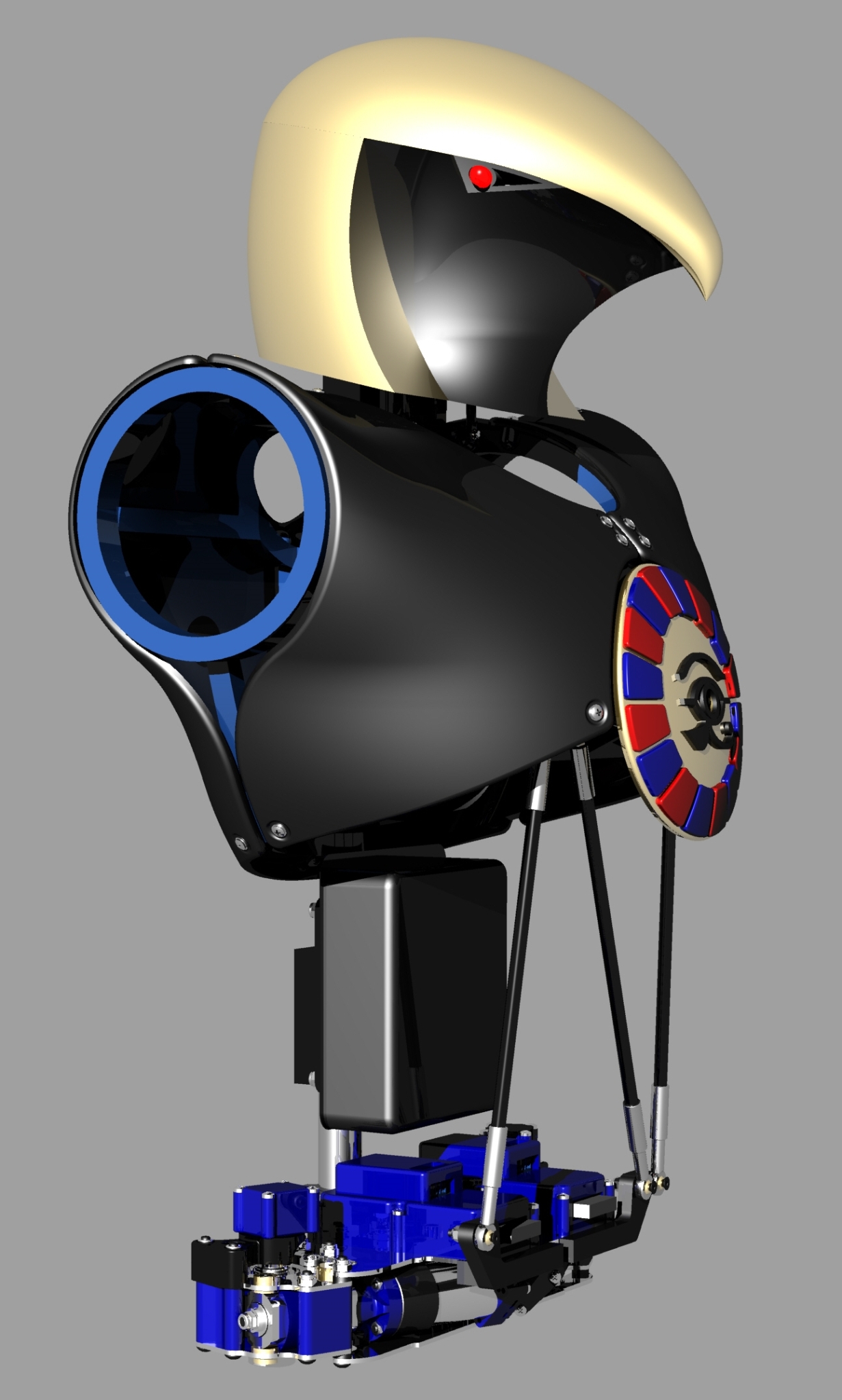
This Blog is dedicated to share my experiments on the manufacturing of HORUS Mk. I, the progress of its walking abilities and the creation of the upper body.
Your comments and questions are welcome. Your feedbacks will be precious to improve and enrich the content of this Blog.
Arnaud Villeneuve
August 2018