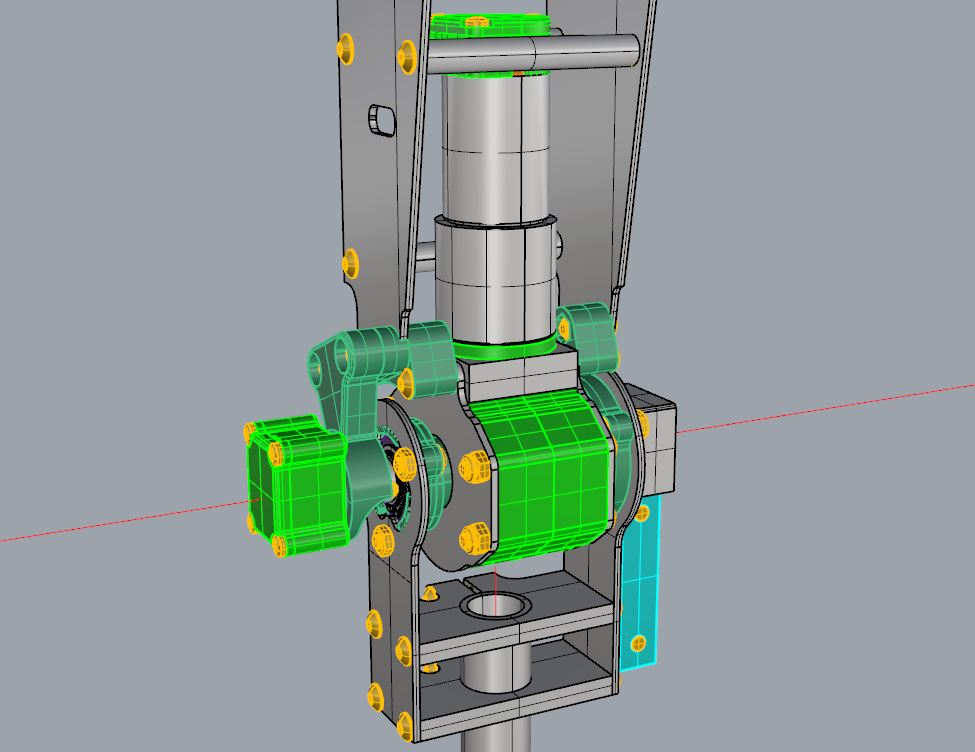
The Knee Joint y4 is built in a very similar way than the Hip Joint y3.
The bevel gear rotary actuator is fixed to the lower end of the thigh assembly. 3D printed spacer are inserted between the thigh plate and the actuator housing.
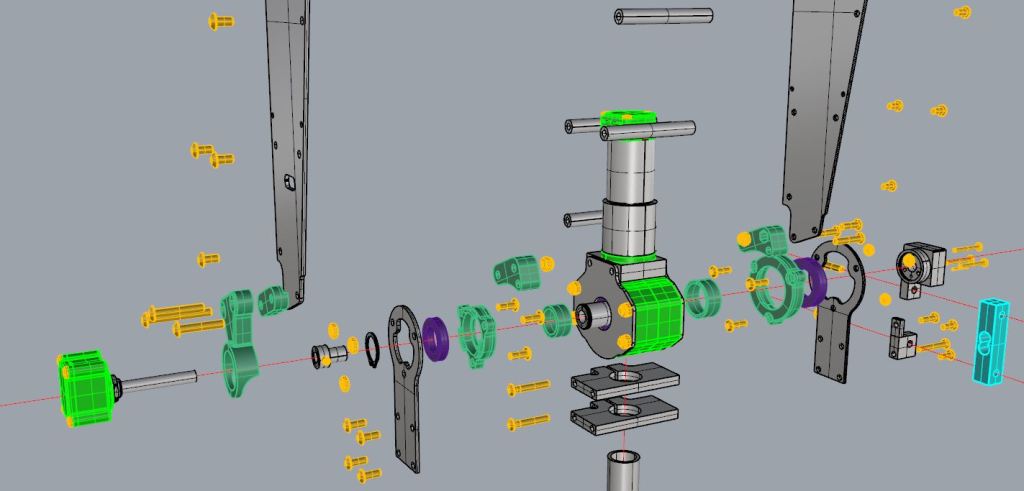
The upper leg end is mounted on the actuator output shaft through CNC machines plates carrying ball bearing so that it can rotate freely. These plates hold the leg tube through two CNC machined 6 mm thick flanges with clamping screws.

The rotation of the actuator output shaft is transmitted to the leg through a load cell.
The position sensor housing is fixed to the lower end of the thigh assembly.
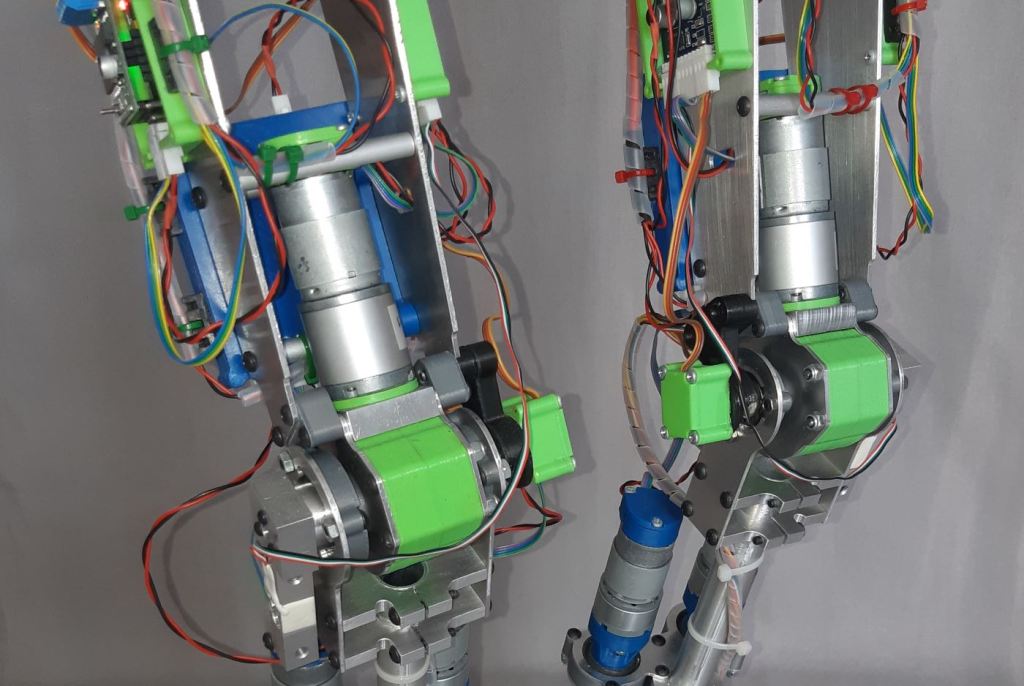
And now a photo of the real Robot Knees :